Image Processing
É o ramo da ciência da computação que estuda a aquisição/modificação/análise de imagens/vídeos por meio de algorítimos.
Imagem Digital
É representada como uma matriz 2D. E cada cédula é um pixel.

Pixel
| . É uma função que mapeia um ponto para um valor de uma cor/intensidade.
Resolução
. Refere-se a quantidade de detalhe/informação uma imagem digital contém. (nível de detalhe espacial que a imagem pode representar). Quantos pixels a imagem possui, linhas colunas.
Quantização
Representado por , diz quantos valores de tons cada pixel pode ter. Em uma imagem preto e branco (1 bit, é 0 ou 1, preto ou branco o pixel). Em imagens gray-scale . Em imagens RGB . (números de tons de cinza (NC - níveis de cinza) ou, também, números de bits por pixel).
Size
O tamanho de uma imagem sem compressão em bytes é . Ou seja, o representa quantos bits são usados para representar os possíveis valores. E dividimos por para escrevermos o tamanho em bytes.
Sinal
Uma imagem pode ser representada como um sinal periódico 2D de domínio espacial (coordenadas dos pixels). (Observação: é periódico porque é finito). Ou seja, um função mostra como a amplitude (intensidade ) no domínio espacial (cada pixel ) da imagem.
Frequência
O número de vezes que um padrão de intensidade se repete em uma imagem. Regiões homogêneas, acarretam em uma frequência baixa e regiões heterogêneas (de textura, bordas) demonstram altas frequências.
Imagens Binárias
Usa-se imagens binárias onde cada pixel .
- Foreground. (preto)
- Background. (branco)
- Don't Care. (É uma marcação indicando que não importa o valor desse pixel para os algorítimos). Um objeto é um conjunto de elementos foreground.
Amostragem
É o processo de converter um sinal contínuo (como as ondas eletromagnéticas da luz) do mundo real em um conjunto de valores discretos e finitos (como uma fotografia/imagem digital).
Imagem Contínua Imagem discreta.
Espacial
É o processo de amostragem que determina a resolução da imagem. Quantos pixels vão ser usados para representar a imagem. Exemplo: Uma imagem de 512 × 512 pixels tem mais amostragem espacial que uma de 128 × 128 pixels, logo consegue mostrar mais detalhes.
Espectral
É o processo que define a quantização da imagem. Quantos valores serão atribuídos para cada pixel de uma imagem durante a sua "criação"
Transformações Geométricas
Operações aplicadas a imagens que alteram a posição dos pixels/ sua geometria, sem mudar os valores de intensidade.
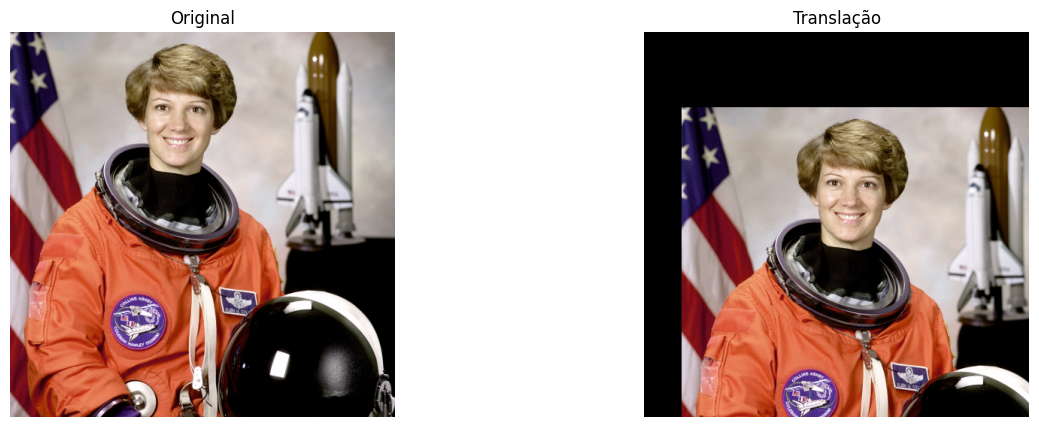
Translação
É deslocar as cordeadas de uma imagem. Ou seja, somar um vetor nos pontos/pixels da imagem. (É uma soma vetorial)
 A translação não é uma Transformação Linear porque ela não preserva a origem, ponto . . (Ela faz parte na verdade das transformações afins)
A translação não é uma Transformação Linear porque ela não preserva a origem, ponto . . (Ela faz parte na verdade das transformações afins)
Escala

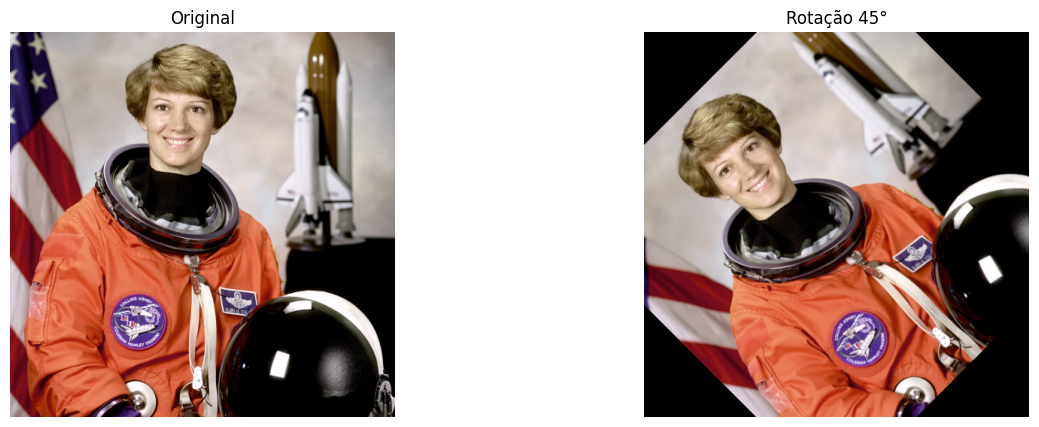
Rotação
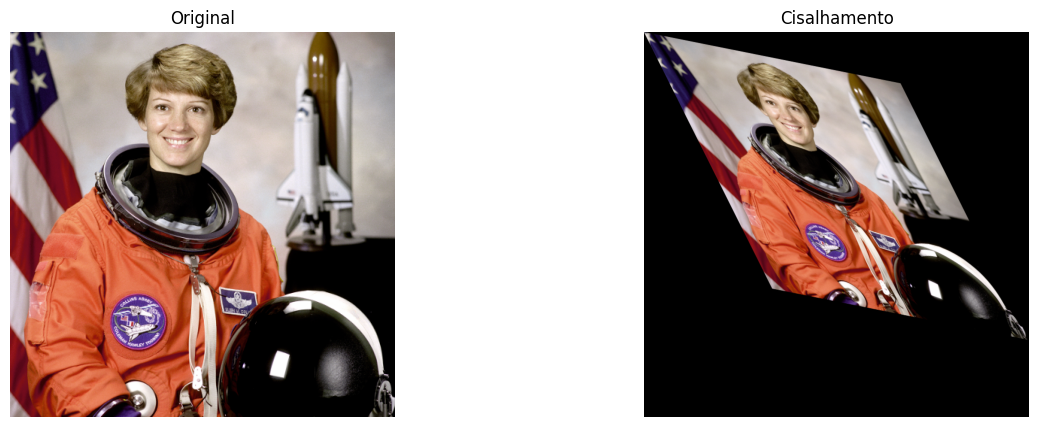
Shear
Reflexão/ Espelhamento

Morfologia
Morfologia matemática é um conjunto de técnicas para extrair componentes, descrever formas, remover ruídos com base na geometria dos objetos. É um tipo de filtro que modifica os pixels, um pre-processamento antes de entregar para um outro algorítimo (em geral). São filtros que tipicamente são aplicados em imagens binárias (apesar de da para aplicar em outros tipos de imagens).
Kernel
Chamada também de máscara, operador morfológico, ou elemento estruturante - EE. É um pequeno (ex: ) conjunto de pixels.
Erosão
Sempre que o EE estiver todos os pixeis foreground no objeto da imagem (conjunto de pixels foreground da imagem) o pixel central é marcado na output image. (Chama-se essa ocorrência de FIT). Percorre a imagem com a "janela"/ o kernel. Quando ocorre um FIT, a posição do centro do kernel na imagem original é escrito na output image. Espera que todo o kernel esteja dentro do objeto inicial.
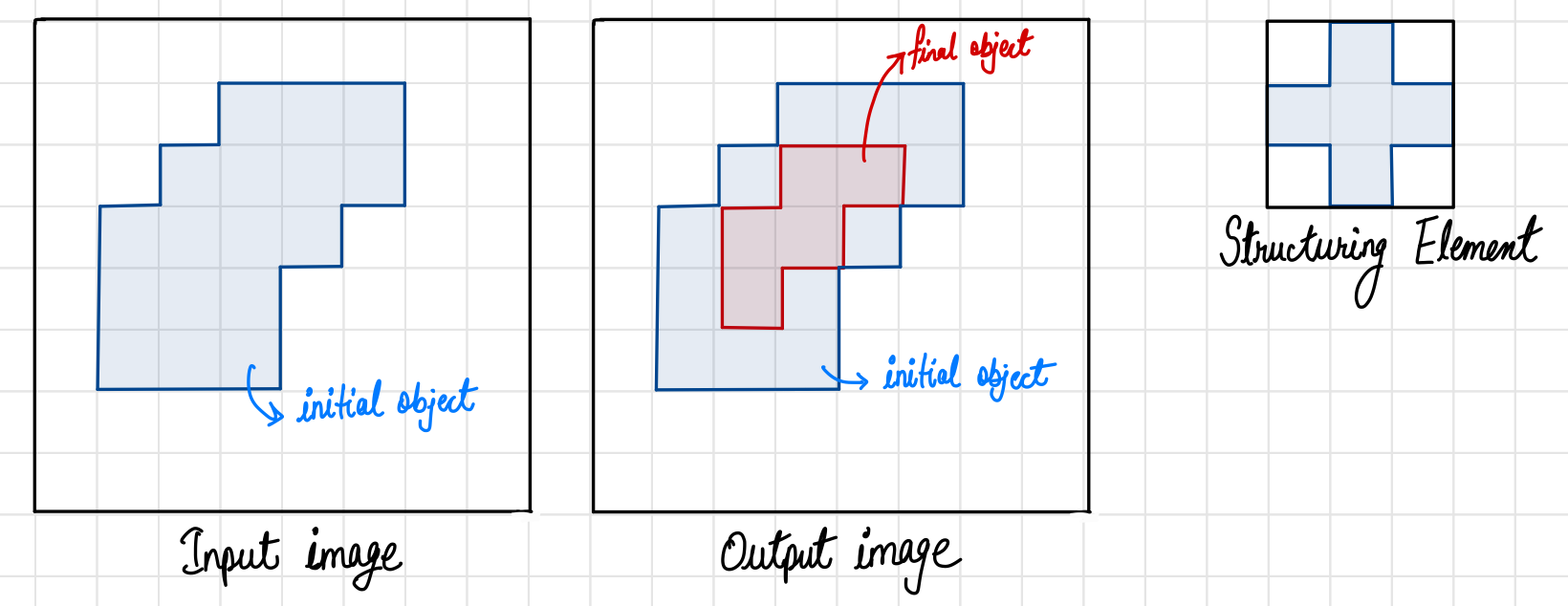

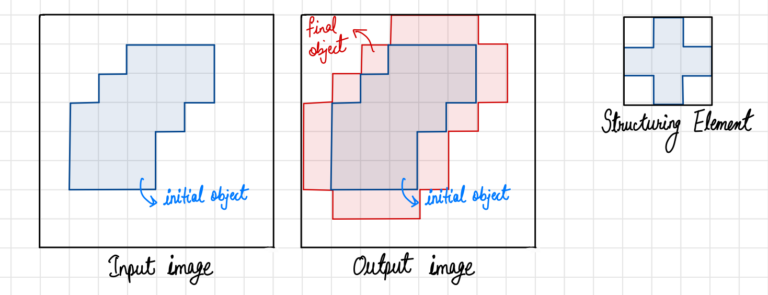
Dilatação
Basta 1 pixel da janela do EE hitar o objeto da imagem original que ele é escrito na output image. Ela "engorda" a imagem. É muito útil para preencher buracos.

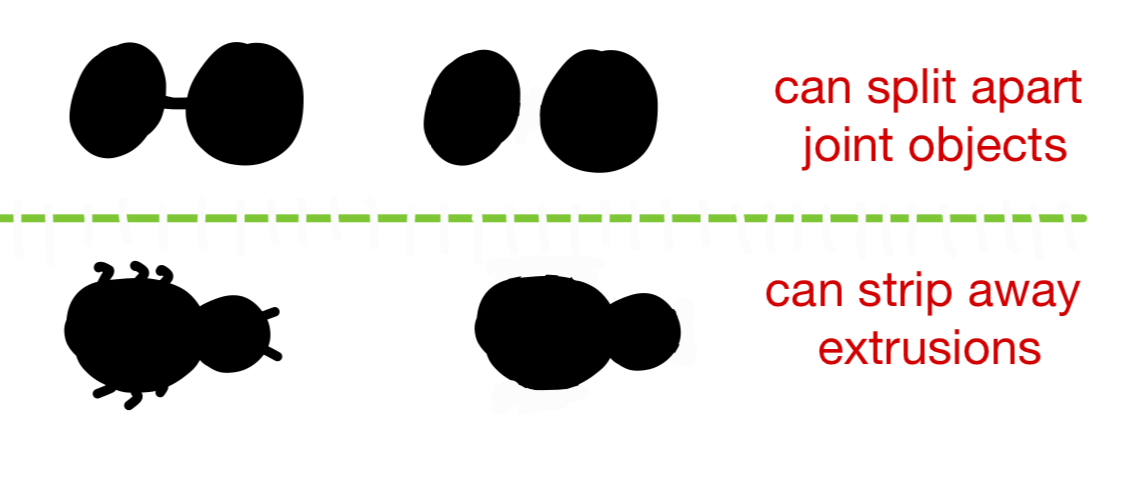
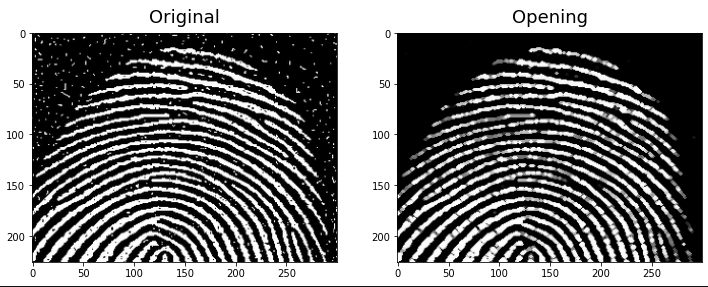
Abertura
Aplicação da erosão seguida da dilatação. É extremamente bom para remover pequenos ruídos (a erosão inicial elimina os pequenos ruídos e a dilatação posterior "volta" os objetos maiores como era antes).
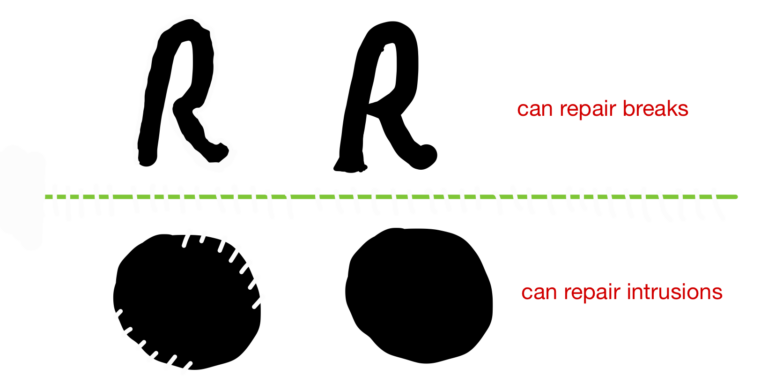
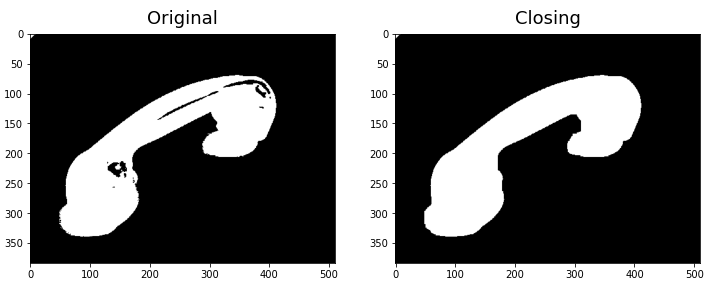
Fechamento
Aplicação da dilatação seguida da erosão. Muito útil para o fechamento de buracos.
Extração do Contorno
Ou também chamado de gradiente morfológico, é o resultado da imagem original dilatada subtraída pela imagem original erodida. (Ou, em algumas literaturas é a imagem original subtraída da imagem original erodida). Isso resulta no contorno dos objetos.

Segmentação
Particionar a imagem em regiões que representam os objetos da cena, que possuem determinas propriedades (texturas, cores, etc).
Segmentação é um problema intrinsecamente mal definido. A dificuldade não necessariamente limitada por capacidade computacional, a definição de segmento/região é ambígua e depende de um contexto. A maior dificuldade está em decidir quais critérios definem as regiões.
Conectividade
Como agrupa-se pixels vizinhos para formar regiões conectadas (componentes).
- N4 - left, top, right and bottom
- N8 - incluí as diagonais
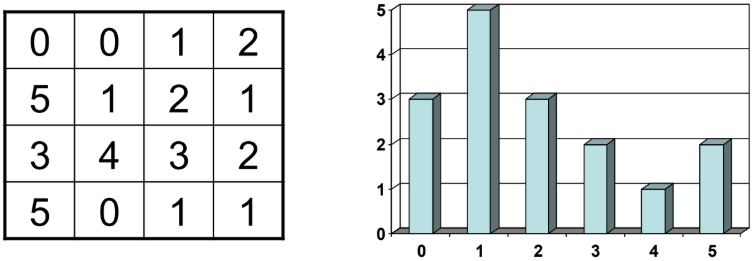
Histograma
Gráfico de distribuição da ocorrência dos valores uma imagem.
 Se for uma imagem com mais de um canal (ex RGB) é feito um histograma para cada canal. Útil para analisar:
Se for uma imagem com mais de um canal (ex RGB) é feito um histograma para cada canal. Útil para analisar:
- contraste (alto contraste se o histogram estiver "espelhado")
- Ajudar a encontrar threshold (um limiar para separar objeto de fundo)
Segmentação por Região
Ou segmentação por homogeneidade. É uma família de técnicas de segmentação de imagens.
A ideia é agrupar pixels vizinhos que têm propriedades semelhantes (intensidade, cor, textura, etc.) formando regiões homogêneas.
Limiarização
Thresholding é uma segmentação baseada em intensidade, onde se usa o histograma para definir thresholds/limiares que definem regiões. (Normalmente se usar gray-scale images com input. A saída clássica é uma imagem binária (que no caso se utiliza 1 threshold)).
Um único threshold global define dois valore possíveis e resulta em uma imagens binária.
undefined